under construction
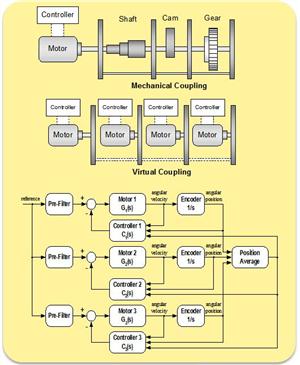
This project investigates on motion synchronization of a multiple
axes system. Two different control strategies, a cross-coupling
controller in feedback loop and a linear quadratic optimal controller,
were used to synthesize the synchronization compensator with the
cross-coupling dynamics among the axes. These two methods are
corresponding to SISO and MIMO approaches. With the strategies, the
asymptotic convergence of both tracking and synchronization errors can
be achieved.
under construction

© Copyright 2012. All rights reserved