Integrated
control-communication framework for cyber-physical systems and WSN based
control application
The long-term goal of this research is to
develop methods based on an integrated control-communication design
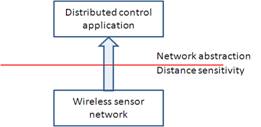
to support cyber-physical systems and sensor-actuator network based control
applications. We formulate network-level abstractions that characterize the
information requirements of controllers and applications that use the network,
and then design middleware services that implement these abstractions. By doing
so, we expect to improve the scalability and reliability of the network layer
and at the same time enable an information-adaptive design of the higher level
applications: the applications can adjust their performance based on the quality of
information available and guarantee robustness despite information loss.
|
|
One
specific network abstraction that we are exploring is that of distance-sensitivity.
The rationale behind exploiting distance sensitivity for information delivery
is that for many spatially distributed control systems, the influence of an
actuator on sensors decays with distance and likewise a controller tends to
be less impacted by sensors that are farther away. By exploiting distance
sensitivity properties, 1. the
required information to make a decision at each controller can be bounded in
terms of the spatial locality around the controller and / or 2. the
accuracy and rate at which the information is provided to a controller to a
sensor can decrease progressively with distance. As a result, the implementation of network
services to meet control requirements becomes simple and efficient. |
We are
applying our network abstraction based co-design approach in the context of following
sensor actuator network based control applications:
1. Vehicular
safety and intelligent navigation applications
2. Distributed
cooperative control of mobile objects (autonomous vehicles, robots,
pursuer-evader systems) for objectives such as optimal pursuit, shape formation
and optimal coverage
3. Distributed
coverage optimization in large-scale wireless camera networks
Publications
in this area:
1. V.
Kulathumani, A. Arora and
S. Ramagiri, “Pursuit Control over Wireless Sensor Networks using
Distance Sensitivity Properties”, Accepted for Publication in IEEE
Transactions on Automatic Control, Special Issue on Wireless Sensor Actuator
Networks, 56(10), pp.2473—2478, 2011 Extended version
2. B.
Lemon, V. Kulathumani, “Local reconfiguration algorithms for simultaneous coverage and
tracking using a large scale wireless camera network”, IEEE
HST 2011
3.
V. Kulathumani,
M. Demirbas, A. Arora, M. Sridharan, Trail: A Distance Sensitive Network Protocol for
Distributed Object Tracking , EWSN 2007, ACM TOSN
4. Hui
Cao, Emre Ertin, Vinodkrishnan Kulathumani et al.,
Differential
Games in Large Scale Sensor Actuator Networks ,
IPSN'06.
5. V. Kulathumani and A. Arora, Distance Sensitive Snapshots in Wireless Sensor
Networks, International
Conference on Principles of Distributed Systems (OPODIS), 2007
6. V.
Kulathumani, A. Arora, Aspects of
Distance Sensitive Design of Wireless Sensor Networks, IEEE Workshop
on Spatial Computing, Venice, Italy, 2008
7. V.
Kulathumani, Network Abstractions for Designing Reliable
Applications using Wireless Sensor Networks , Ph.D. Thesis, The Ohio
State University, June 2008.
8. V.
Kulathumani, P. Shankar, Y. Kim, A. Arora, and R. Yedavalli, Reliable Control System
Design Despite Byzantine Actuators, Fifth ASME International
Conference on Multibody Systems, Nonlinear Dynamics
and Controls (MSNDC 2005)
9. Y.
Kim, A. Arora, V. Kulathumani,
U. Arumugam, and S. Kulkarni,
On the Effect of Faults in
Vibration Control of Fairing Structures, Fifth ASME International
Conference on Multibody Systems, Nonlinear Dynamics
and Controls (MSNDC 2005)